The Azure IoT Platform is a very versatile solution for all your IoT needs. Azure supports multiple resources for storing large amounts of data, querying immense streams of data coming in, having event buses which can hold millions of messages, serverless functions, reporting and Machine Learning; what more do you need?
But it all starts with the IoT Hub:
“Azure IoT Hub is a fully managed service that enables reliable and secure bidirectional communications between millions of IoT devices and a solution back end”
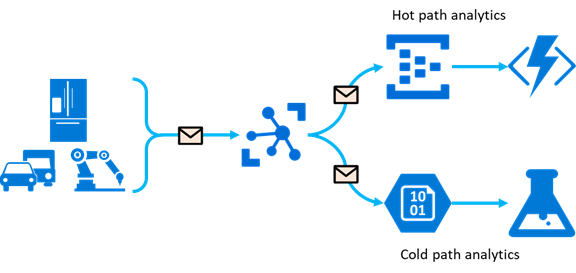
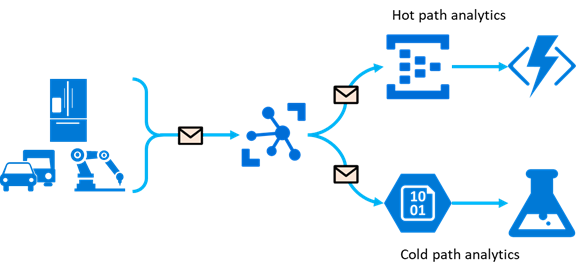
Normally, whenever I start a new IoT Platform solution in Azure, I start with an IoT Hub and connect it to a Stream Analytics job as an input source. Messages arriving at the IoT Hub are then passed directly into the Stream Analytics job to be examined. And the Stream Analytics job can pass some or all messages (or transformed messages) to multiple output sinks eg. Event Hubs, Service Bus Queue or Topic, Blob Storage, etc.
The arriving messages carry telemetry information from the device. But what if the messages are sent in a certain context? What if a message has a high or low priority? Should we pollute the message with this ‘routing’ information? And Act on it inside the Stream Analytics job?
A few week ago, Microsoft introduced a new feature in IoT Hub, called message routing.
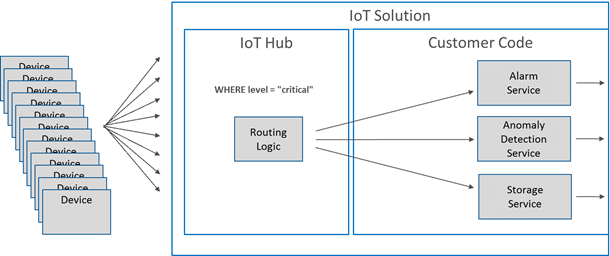
This makes it fairly easy to react on difference messages, arriving at the same IoT Hub, but intended to handled differently. Routing is perfect for this matter. We can declare extra endpoints directly in the IoT Hub. And depending on message properties, messages can be sent directly to these endpoints:
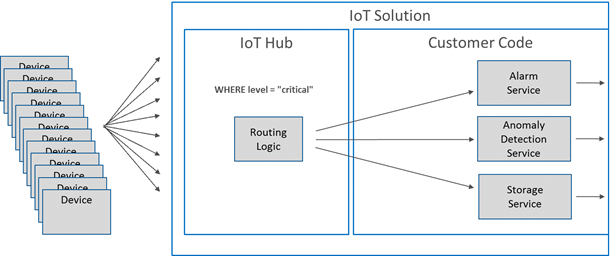
There are two important things to keep in mind. First, the message properties are extra annotations (defined by the IoT Hub device client), we are not peaking inside the message itself. And second, messages can still end up in a Stream Analytics input when it is ignored by the active routes.
Let’s take a closer look.
Update 2017-06-01: Microsoft announced that routing is now supporting values from the actual telemetry, great news and now it’s more intuitive!
Doorgaan met het lezen van “Flexible message routing in Azure IoT Hub using C#”